Un Sistema de servo de CA es una configuración de control de movimiento sofisticada famosa por su precisión, velocidad y rendimiento dinámico. A diferencia de los sistemas de circuito abierto más simples, los servo sistemas emplean un mecanismo de control de circuito cerrado, monitoreando y ajustando constantemente la posición, la velocidad y el par del motor para lograr movimientos altamente precisos y repetibles. Comprender los componentes individuales que componen dicho sistema es crucial para cualquier persona que trabaje con automatización industrial, robótica o maquinaria de alto rendimiento.
Los componentes centrales de un servo sistema de CA
Si bien la complejidad puede variar, un servo sistema de CA típico comprende fundamentalmente cuatro componentes clave que funcionan en concierto:
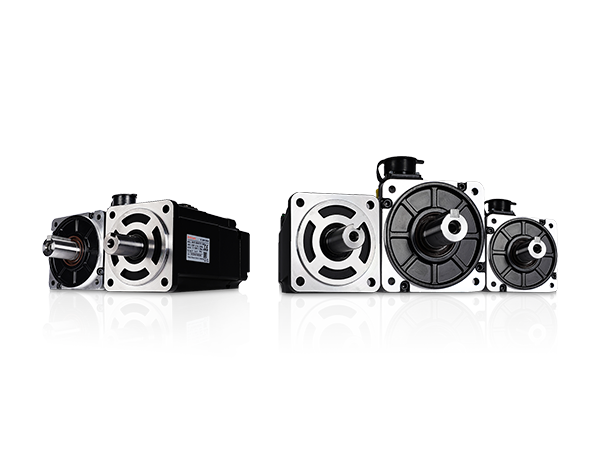
1. El servomotor de servo de aire acondicionado
El Servo Motor de CA es el músculo del sistema, responsable de generar movimiento mecánico. Estos son motores sincrónicos de imán (PMSM) típicamente permanentes o motores de inducción diseñados para una alta respuesta dinámica. Las características clave incluyen baja inercia, alta densidad de potencia y un excelente control de torque en un amplio rango de velocidad. A diferencia de los motores de inducción de CA estándar, los servomotores están diseñados para un control preciso, a menudo con un recuento de polos más alto y devanados especializados para minimizar la ondulación de torque y mejorar el funcionamiento suave. Están construidos para manejar aceleración rápida, desaceleración y cambios frecuentes en la dirección, lo que los hace ideales para aplicaciones dinámicas.
2. La unidad de servo de CA
A menudo considerado el cerebro del sistema, el AC Servo Drive (también conocido como un amplificador servo , servo controlador , o servo inversor ) es un dispositivo electrónico que recibe señales de control de un controlador externo y las convierte en la potencia precisa requerida para operar el servomotor. Actúa como una interfaz, administrando el voltaje, la corriente y la frecuencia del motor en función de la retroalimentación que recibe. La unidad de servomotrenal contiene algoritmos de control sofisticados (como los controladores PID) que le permiten regular con precisión la posición, la velocidad y el par del motor. Las unidades de servo modernas son altamente inteligentes, ofreciendo características como el ajuste automático, varios protocolos de comunicación (por ejemplo, EtherCat, Profinet, CANopen) y capacidades de diagnóstico incorporadas, simplificando la puesta en marcha y la solución de problemas.
3. El dispositivo de retroalimentación
El dispositivo de retroalimentación son los ojos del sistema, que proporciona información en tiempo real sobre la posición real del motor, la velocidad o ambos. Esta información es crítica para el control de circuito cerrado. Los dispositivos de retroalimentación más comunes son:
-
Codificadores: Estos convierten la posición angular en señales eléctricas.
-
Codificadores incrementales: Proporcione pulsos para cada incremento de rotación, utilizado para la velocidad y la posición relativa.
-
Codificadores absolutos: Proporcione un código digital único para cada posición angular, reteniendo la información de posición incluso después de la pérdida de energía.
-
Resueltos: Dispositivos analógicos robustos que proporcionan comentarios de posición absolutos, a menudo preferidos en entornos hostiles debido a su resistencia al choque y a la vibración.
-
Sensores de efectos de la sala: A veces se usa en servomotores más simples para determinar la posición del rotor para la conmutación.
El dispositivo de retroalimentación se monta directamente en el servomotor o la carga, transmitiendo datos precisos de regreso a la unidad de servo, que luego compara el estado real con el estado comandado y ajusta la salida del motor en consecuencia.

4. El controlador de movimiento (o PLC con capacidades de control de movimiento)
El controlador de movimiento es el planificador estratégico del sistema. Es la unidad de comando central que emite instrucciones a la unidad de servo. Este puede ser un controlador de movimiento dedicado, un controlador lógico programable (PLC) con módulos de control de movimiento integrados, o incluso un sistema de control basado en PC. El controlador de movimiento almacena los perfiles de movimiento deseados (por ejemplo, posiciones específicas, velocidades, rampas de aceleración) y envía comandos al Servo Drive. Administra movimientos complejos coordinados de eje múltiples, sincronización y secuencia general de operaciones para la máquina o el sistema robótico. La sofisticación del controlador de movimiento dicta la complejidad y precisión de los movimientos que puede lograr el servo sistema.
Cómo trabajan juntos
La sinergia entre estos componentes es lo que hace que un servo sistema de CA sea tan poderoso. El controlador de movimiento envía un comando de movimiento deseado al AC Servo Drive . El servo Luego calcula el voltaje y la corriente necesarios para aplicar al Servo Motor de CA . A medida que el motor se mueve, el dispositivo de retroalimentación Informa continuamente su posición real y su velocidad de regreso a la unidad de servo. El Servo Drive compara esta retroalimentación con los valores comandados y realiza ajustes instantáneos, asegurando que el motor siga con precisión el camino deseado. Este circuito de retroalimentación continua es la esencia del control de circuito cerrado, garantizando una alta precisión, repetibilidad y respuesta dinámica, incluso en diferentes condiciones de carga.
Comprender estos componentes fundamentales proporciona una base sólida para diseñar, implementar y mantener soluciones de automatización de alto rendimiento.
 English
English Español
Español عربى
عربى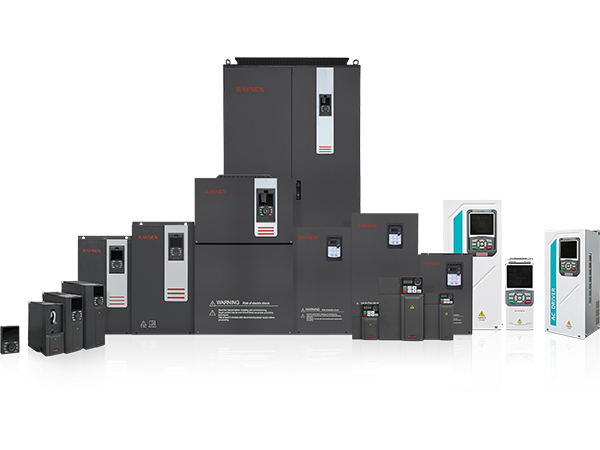






















-315(355)kW")









